
SSD:Single Shot MultiBox Detector (ECCV 16)
Abstract
提出了一种端到端的目标检测模型SSD,主要过程包括:
- 将原本的bounding box输出空间预设为一组具有不同横纵比和大小的default box
- 预测时,为每一个deafult box输出每一个类别的得分,并调整box更好的适应目标形状
- 模型结合了不同尺度的特征进行预测,可以处理各种大小的目标
相对于那些需要 object proposals 的检测模型,本文的 SSD 方法完全取消了 proposals generation、pixel resampling 或者 feature resampling 这些阶段。这样使得 SSD 更容易去优化训练,也更容易地将检测模型融合进系统之中。
Introduction
目前流行的目标检测系统架构:
- 假设一些bounding boxes -> 在box中提取特征 -> 利用分类器进行分类
这类系统对于嵌入式系统来说,计算复杂度太高,无法实时进行。而速度快的实时系统,目前为止都是牺牲精度来换取时间。
本文的deep network 不需要bounding boxes和pixel or feature resampling的过程,但是却取得了更好的效果,在VOC2007 test数据集上:
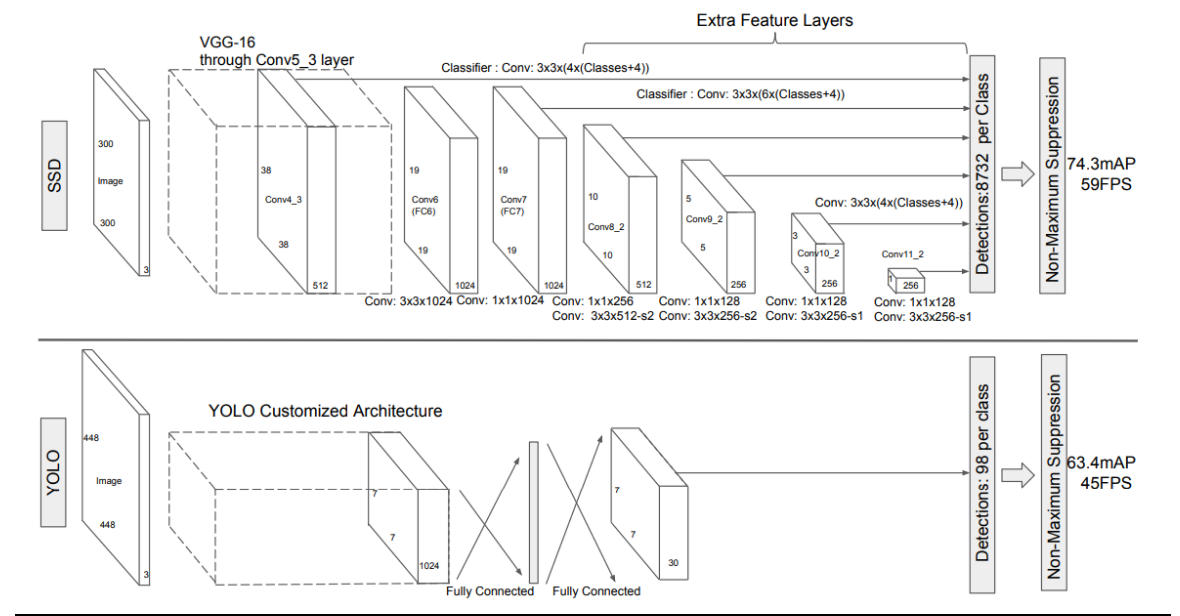
- SSD: 59fps with mAP 74.3%
- Faster RCNN: 7fps with mAP 73.2%
- YOLO: 45fps wiht mAP 63.4%
本文的主要贡献包括:
- 提出的SSD方法,比YOLO更快,其结果可以与Faster RCNN相媲美
- SSD的核心在于利用小的卷积核在feature maps上基于固定的default bounding boxes去预测物体类别的得分核box offsets
- 在不同尺度的feature map上进行预测,同时separate predictions by aspect ratio
- high accuracy + end to end training
- 在不同的数据集上,如 PASCAL VOC、MS COCO、ILSVRC, 都进行了测试。在检测时间(timing)、检测精度(accuracy)上,均与目前物体检测领域 state-of-art 的检测方法进行了比较。
The Single Shot Detector
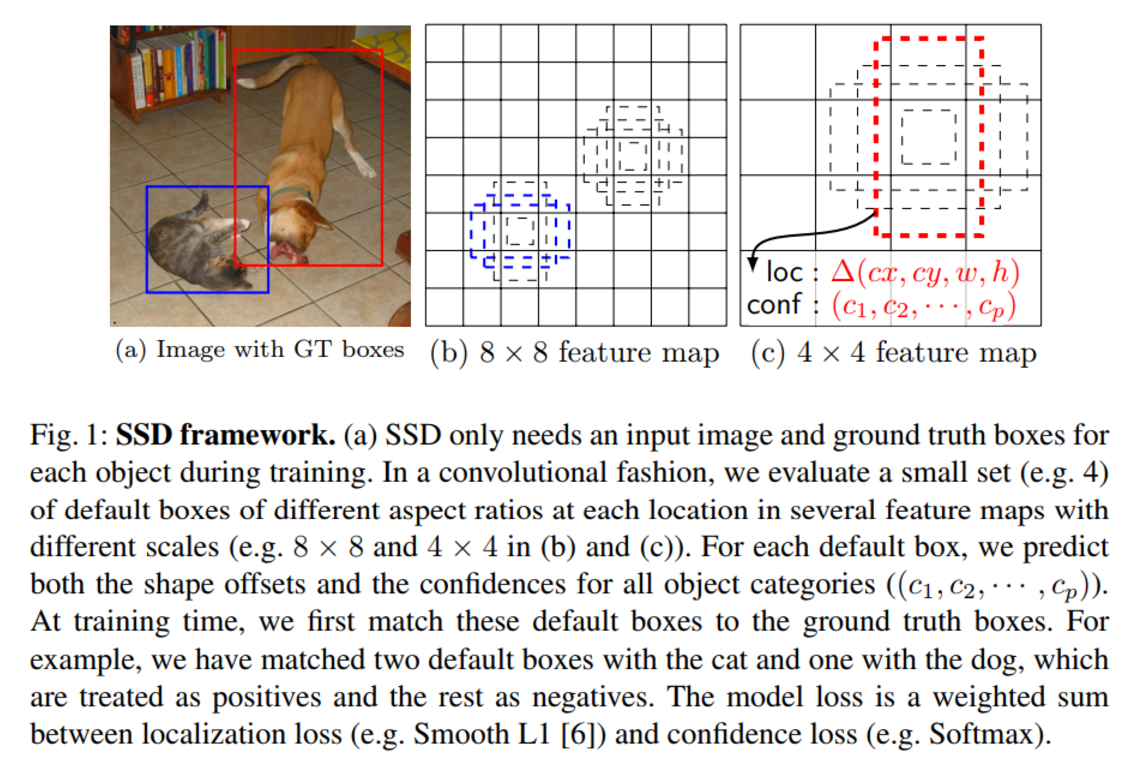
- feature map cell 就是将 feature map 切分成8*8或者4*4之后的一个个 格子
- default box 就是每一个格子上,一系列固定大小的 box,即图中虚线所形成的一系列 boxes
- 准备训练数据时,需要先将ground true与最佳的default box配对,当作正例,其余的为负例
- 模型损失是localization loss(Smooth L1)与confidence loss(Softmax)加权和
2.1 Model
SSD 是基于一个前向传播 CNN 网络,产生一系列 固定大小(fixed-size) 的 bounding boxes,以及每一个 box 中包含物体实例的可能性,即 score。之后,进行一个 非极大值抑制(Non-maximum suppression) 得到最终的 predictions。
SSD 模型的最开始部分,本文称作 base network,是用于图像分类的标准架构。在 base network 之后,本文添加了额外辅助的网络结构:
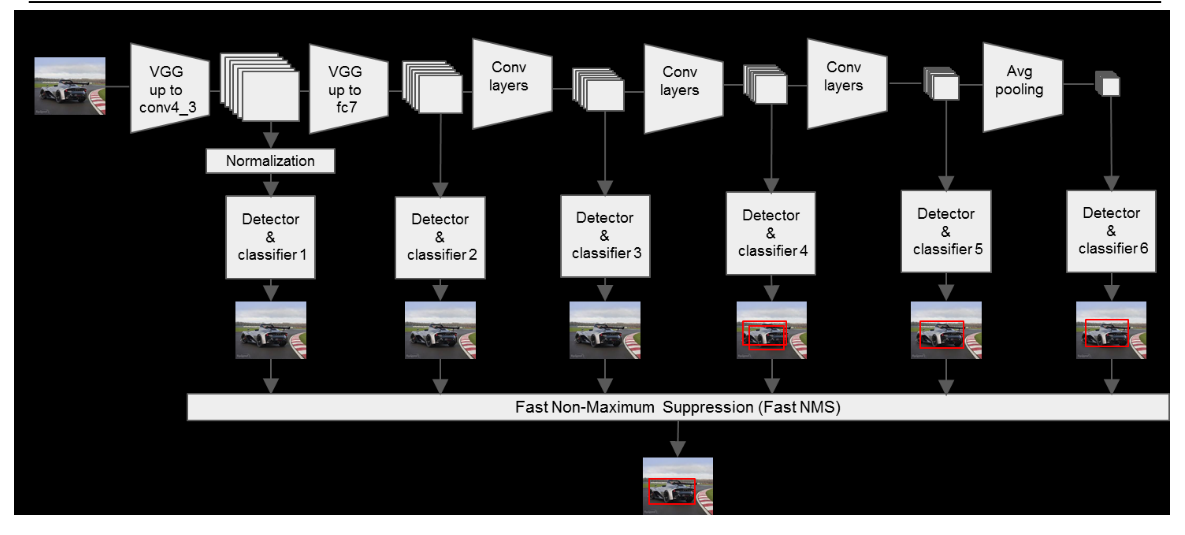
Multi-scale feature maps for detection
- 在基础网络结构后,添加了额外的卷积层,这些卷积层的大小是逐层递减的,可以在多尺度下进行 predictions。
Convolutional predictors for detection
- 每一个添加的特征层(或者在基础网络结构中的特征层),可以使用一系列 convolutional filters,去产生一系列固定大小的 predictions,具体见 Fig.2。对于一个大小为 m×n,具有 p 通道的特征层,使用的 convolutional filters 就是 3×3×p 的 kernels。产生的 predictions,那么就是归属类别的一个得分,要么就是相对于 default box coordinate 的 shape offsets。
在每一个 m×nm×n 的特征图位置上,使用上面的 3×3的 kernel,会产生一个输出值。bounding box offset 值是输出的 default box 与此时 feature map location 之间的相对距离(YOLO 架构则是用一个全连接层来代替这里的卷积层)。
- 每一个添加的特征层(或者在基础网络结构中的特征层),可以使用一系列 convolutional filters,去产生一系列固定大小的 predictions,具体见 Fig.2。对于一个大小为 m×n,具有 p 通道的特征层,使用的 convolutional filters 就是 3×3×p 的 kernels。产生的 predictions,那么就是归属类别的一个得分,要么就是相对于 default box coordinate 的 shape offsets。
- Default boxes and aspect ratios
- 每一个 box 相对于与其对应的 feature map cell 的位置是固定的。 在每一个 feature map cell 中,我们要 predict 得到的 box 与 default box 之间的 offsets,以及每一个 box 中包含物体的 score(每一个类别概率都要计算出)。
因此,对于一个位置上的 kk 个boxes 中的每一个 box,我们需要计算出 cc 个类,每一个类的 score,还有这个 box 相对于 它的默认 box 的 4 个偏移值(offsets)。于是,在 feature map 中的每一个 feature map cell 上,就需要有 (c+4)×k(c+4)×k 个 filters。对于一张 m×nm×n 大小的 feature map,即会产生 (c+4)×k×m×n(c+4)×k×m×n 个输出结果。
- 每一个 box 相对于与其对应的 feature map cell 的位置是固定的。 在每一个 feature map cell 中,我们要 predict 得到的 box 与 default box 之间的 offsets,以及每一个 box 中包含物体的 score(每一个类别概率都要计算出)。
2.2 Training
在训练时,本文的 SSD 与那些用 region proposals + pooling 方法的区别是,SSD 训练图像中的 groundtruth 需要赋予到那些固定输出的 boxes 上。在前面也已经提到了,SSD 输出的是事先定义好的,一系列固定大小的 bounding boxes。
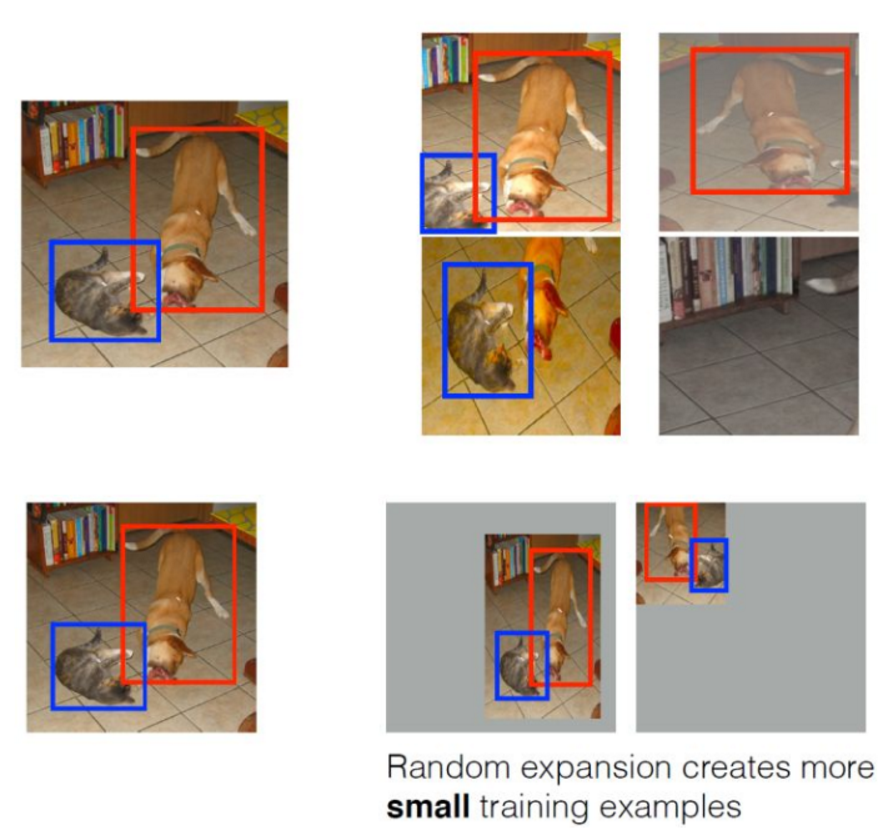
如下图中,狗狗的 groundtruth 是红色的 bounding boxes,但进行 label 标注的时候,要将红色的 groundtruth box 赋予 图(c)中一系列固定输出的 boxes 中的一个,即 图(c)中的红色虚线框。
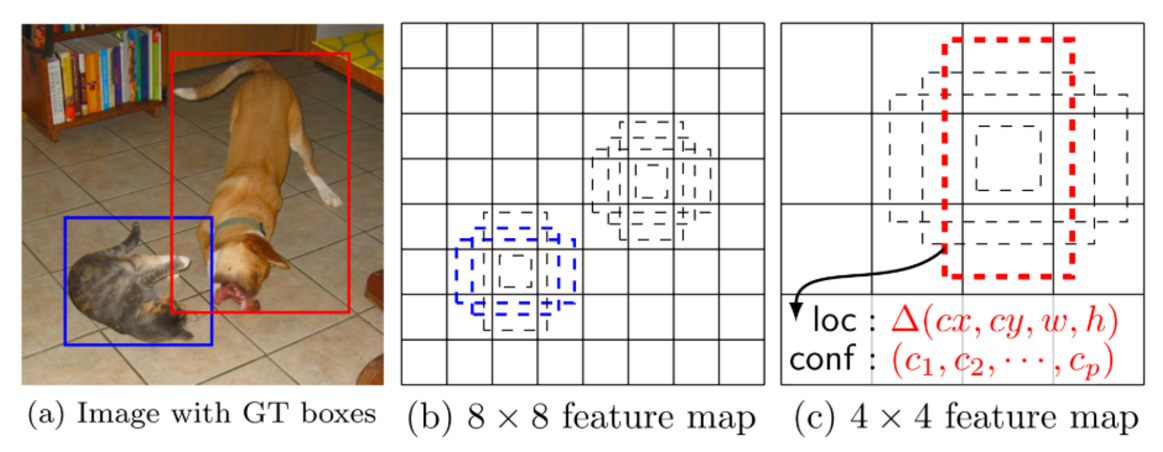
当这种将训练图像中的 groundtruth 与固定输出的 boxes 对应之后,就可以 end-to-end 的进行 loss function 的计算以及 back-propagation 的计算更新了。
训练中涉及到的问题包括:
- 选择一系列的default boxes和scales
- hard negative mining
- augmentation strategies
Matching strategy
如何将 groundtruth boxes 与 default boxes 进行配对,以组成 label 呢?
SSD对于真实GT物体框的分配策略是:
- 首先将GT分配给best jaccard overlap的defult box
- 之后将GT分配给所有jaccard overlap大于0.5的default box
即同一个GT会分配给不同的default box,不同的default box对应的GT可能是同一个,这样做可以简化学习的过程。
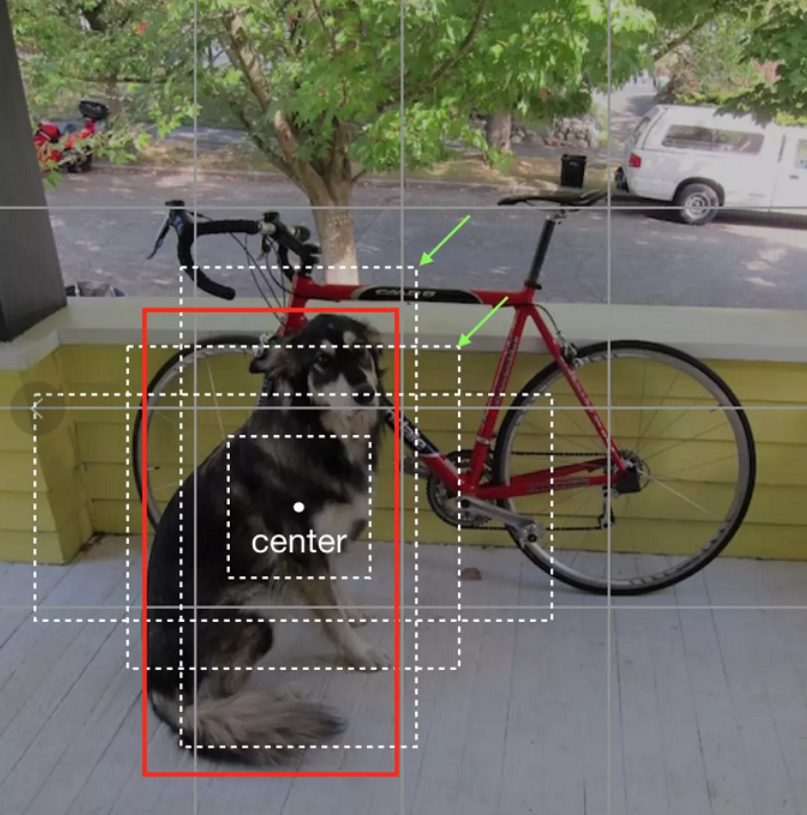
如上图,红色框是dog的真实位置,那么绿色箭指向的两个default box的GT都是红色框,其他两个default box的GT是背景即没有物体。
Training objective
对于正例,即default box有GT框的,loss分为类别损失和位置损失。
对于反例,即default box没有GT框的,loss只有类别损失(类别是背景)。
总的目标损失函数(objective loss function)由 localization loss(loc) 与 confidence loss(conf) 的加权求和组成, 其中N是与GT配对的default boxes的个数:

location loss的计算如下:

其中,l是预测值,g^是真值,对于真值中的(cx,cy,w,h)采用下式计算:
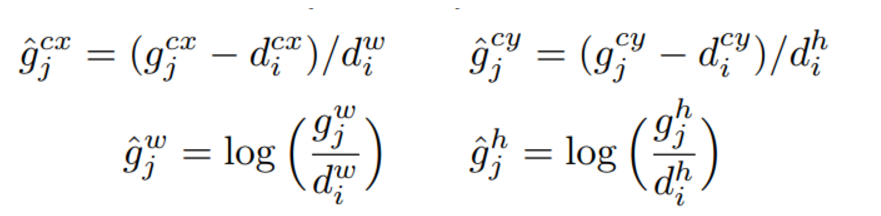
g是ground truth值,d是default box的先验值。可以看出,中心点坐标就是ground truth值与default box先验值得相对差,w和h是ground truth值与default box先验值比值的对数。
其实这样处理都是尽量减小g^hat值变化幅度,减少学习难度。
confidence loss计算如下:

通过交叉验证设定权重α为1。
Choosing scales and aspect ratios for default boxes
为了解决不同目标大小不同这一问题,一些方法提出将输入图片缩放到不同的尺寸进行处理,最后在将所有结果合并起来。但是,通过在同一网络中利用不同尺度的feature maps可以取得相同的效果,同时也可以共享参数和运算。因此,本文同时使用 lower feature maps、upper feature maps 来 predict detections。
一般来说,一个 CNN 网络中不同的 layers 有着不同尺寸的 感受野(receptive fields),越底层的feature map保留的细节更多。假设我们使用m个feature maps用于预测,那么每个feature map的默认defualt boxes的scale计算如下:

其中,smin 取值 0.2,smax 取值 0.95,意味着最低层的尺度是 0.2,最高层的尺度是 0.95。
再用上不同的横纵臂aspect ratios, 用 ar 来表示:ar={1,2,3,1/2,1/3},则每一个 default boxes 的 width、height 就可以计算出来:
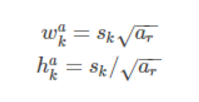
对于 aspect ratio 为 1 时,本文还增加了一个 default box,这个 box 的 scale 是 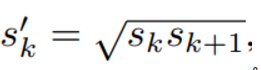 。所以最终,在每个 feature map location 上,有 6 个 default boxes。
。所以最终,在每个 feature map location 上,有 6 个 default boxes。
Hard negative mining
在生成一系列的 predictions 之后,会产生很多个符合 ground truth box 的 predictions boxes,但同时,不符合 ground truth boxes 也很多,而且这个 negative boxes,远多于 positive boxes。这会造成 negative boxes、positive boxes 之间的不均衡。训练时难以收敛。
因此,本文采取,先将每一个物体位置上对应 predictions(default boxes)是 negative 的 boxes 进行排序,按照 default boxes 的 confidence 的大小。 选择最高的几个,保证最后 negatives、positives 的比例在 3:13:1。
本文通过实验发现,这样的比例可以更快的优化,训练也更稳定。
Data augmentation
数据扩增可以提高SSD的性能,本文所采取的措施包括:
- 使用原始图像
- 采样一个 patch,与物体之间最小的 jaccard overlap 为:0.1,0.3,0.5,0.7 与 0.9
- 随机的采样一个 patch
在这些采样步骤之后,每一个采样的 patch 被 resize 到固定的大小,并且以 0.5 的概率随机的 水平翻转(horizontally flipped)
3. Experimental Results
本文的Base network基于VGG 16, ,在 ILSVRC CLS-LOC 数据集上进行了预训练。将 VGG 中的 FC6 layer、FC7 layer 转成为 卷积层,移除所有的 dropout layers和fc8 layer。
PASCAL VOC2007
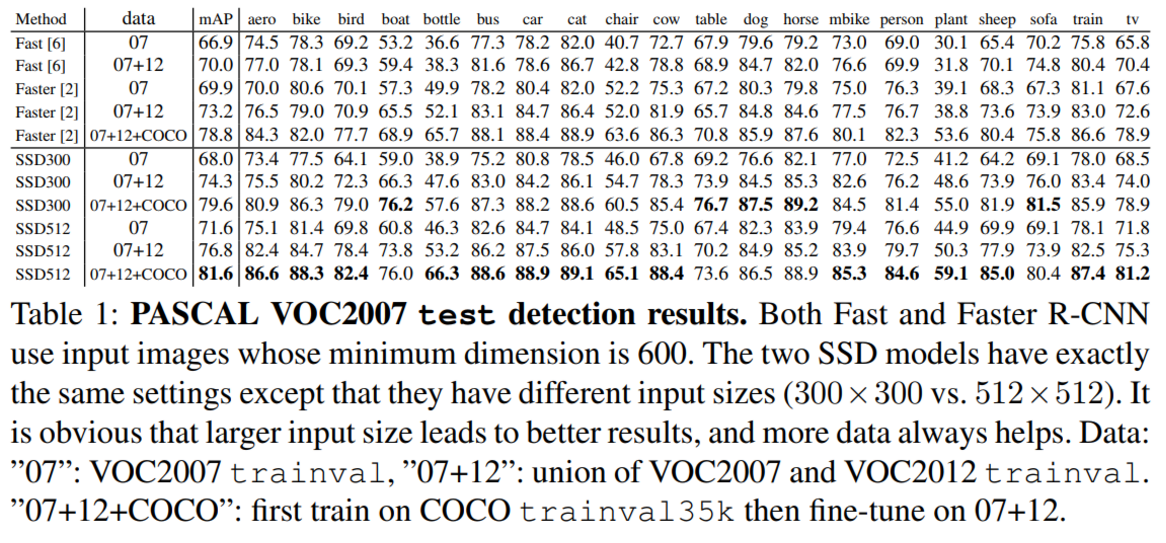
在这个数据集中,与 Fast R-CNN、Faster R-CNN 进行了比较,几种检测网络都用相同的训练数据集,以及预训练模型(VGG16)。
下图展示了 SSD300 model 的结构:
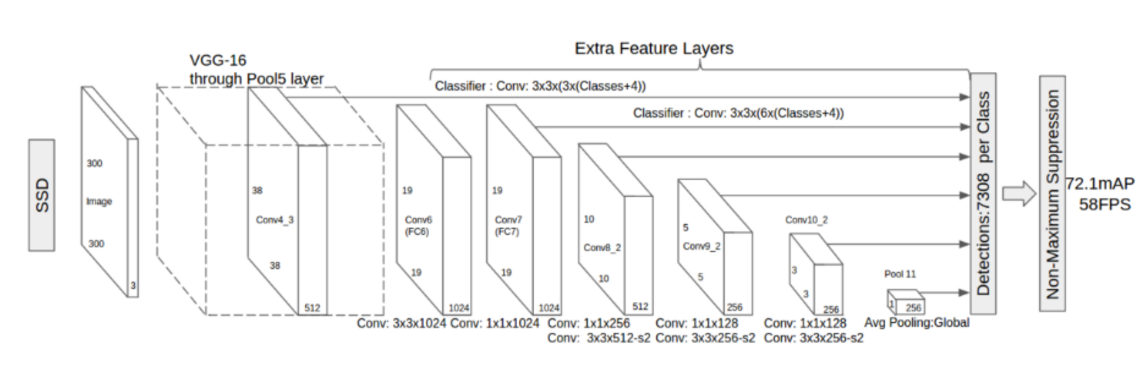
我们用 conv4_3,conv7(原先的 FC7),conv8_2,conv9_2,conv10_2,以及 pool11,这些 layer 来 predict location、 confidence。
在 VGG16 上新加的 convolutional layers,其参数初始化都用 JMLR 2010, Understanding the difficulty of training deep feedforward neural networks 提出的 xavier 方法。
对conv4_3,conv10_2,conv11_2,只采用了4种default boxs(删掉了aspect ratio 3和1/3),其余层均有6种default boxes.
下面 Table 1 显示了,我们的 SSD300 model 的精度已经超过了 Fast R-CNN,当我们用 SSD 在更大的图像尺寸上,500×500 训练得到的 model,甚至要比 Faster R-CNN 还要高出 1.7% 的 mAP。
Model analysis
为了更好的理解 SSD,本文还使用控制变量法来验证 SSD 中的每一部分对最终结果性能的影响。测试如下表 Table 2 所示:
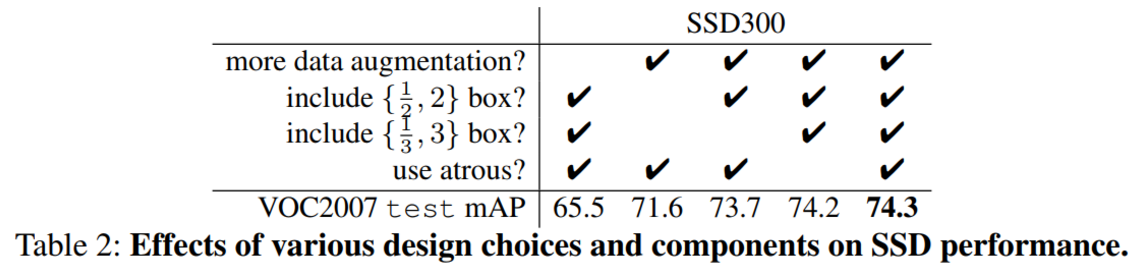
可以得出一下几点结论:
- 数据增广(Data augmentation)对于结果的提升非常明显
- 使用更多的 feature maps 对结果提升更大
- 使用更多的 default boxes,结果也越好
- Atrous 使得 SSD 又好又快